
Пользовательские портативный беспилотник полной частоты глушитель модуль проектирование
Эта статья предоставляет исчерпывающую информацию о проектировании пользовательских портативных беспилотников с модулями подавления полной частоты. Мы рассмотрим ключевые аспекты, начиная от выбора компонентов и заканчивая интеграцией системы подавления помех. Узнайте, как создать надежное и эффективное решение для ваших конкретных задач.
Выбор компонентов для беспилотника
Выбор микроконтроллера
Выбор микроконтроллера зависит от сложности проекта и требуемых функциональных возможностей. Для простых проектов подойдет недорогой 8-битный микроконтроллер, например, Arduino Nano. Для более сложных проектов, требующих обработки больших объемов данных и высокой скорости, лучше использовать 32-битный микроконтроллер, например, STM32.
Выбор модуля GPS
Модуль GPS необходим для определения местоположения беспилотника. Популярными вариантами являются модули Ublox NEO-6M и MediaTek MT3339. Выбор зависит от требуемой точности и скорости позиционирования.
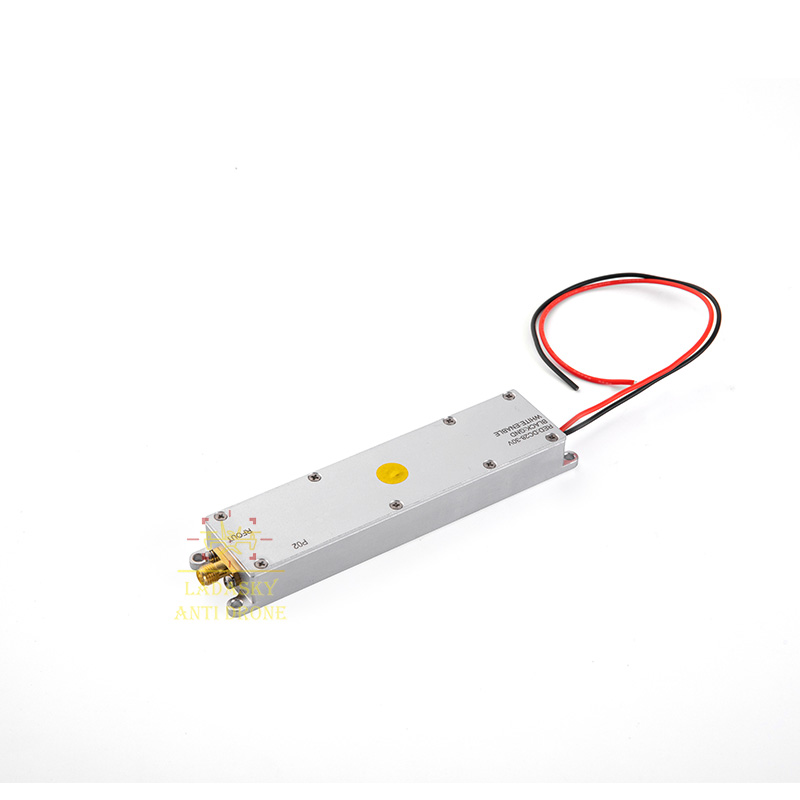
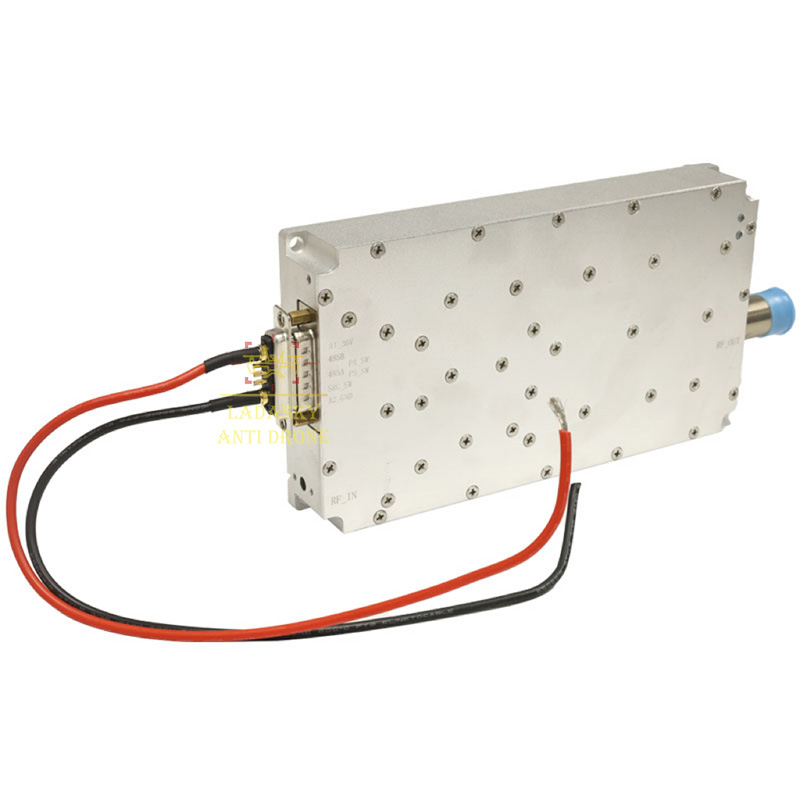
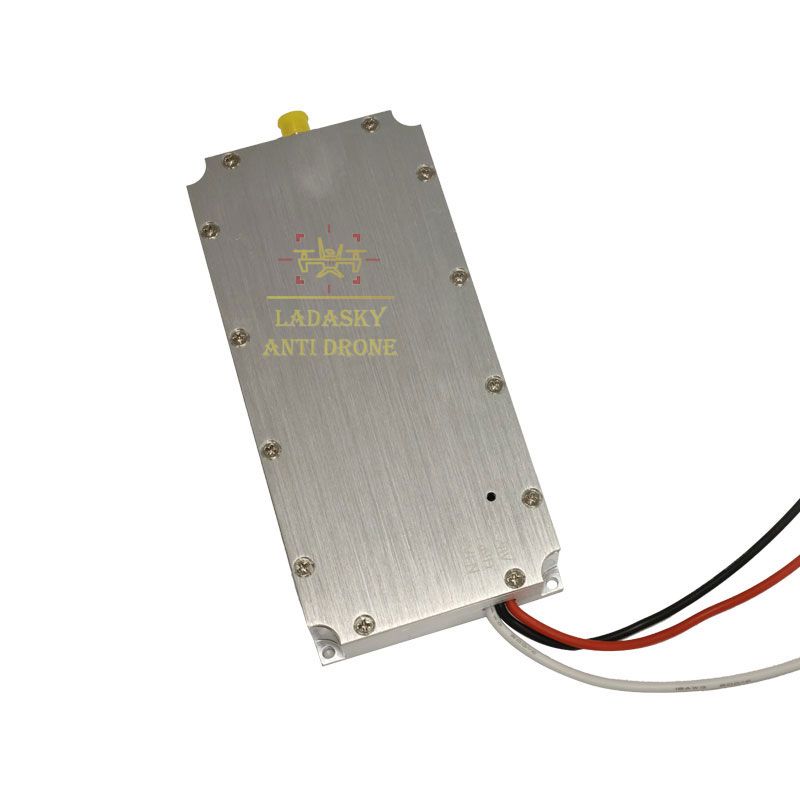
Выбор модуля подавления полной частоты
Это ключевой компонент пользовательских портативных беспилотников с модулями подавления полной частоты. На рынке представлены различные модули с разными характеристиками. Важно выбрать модуль, который соответствует требованиям по частотному диапазону и мощности подавления. Некоторые производители, такие как Shenzhen Ladasky Technology Co., Ltd, специализируются на разработке и производстве таких модулей, предлагая решения для защиты от дронов, включая модули анти-FPV и детекторы БПЛА. При выборе необходимо учитывать такие параметры, как мощность, диапазон частот, потребляемая мощность и габариты. Не забывайте о законодательных ограничениях на использование подобных устройств.
Выбор системы передачи данных
Для управления беспилотником и передачи данных с него используется система беспроводной связи. Популярными вариантами являются Wi-Fi, Bluetooth и системы на основе радиомодулей. Выбор зависит от дальности связи и скорости передачи данных.
Интеграция системы подавления помех
Разработка программного обеспечения
Программное обеспечение должно управлять всеми компонентами беспилотника, включая модуль подавления помех. Необходимо разработать алгоритмы управления, которые обеспечат эффективную работу системы подавления помех. Для этого потребуется глубокое понимание работы модуля и его взаимодействия с другими компонентами системы.
Тестирование и отладка
После сборки беспилотника необходимо провести тщательное тестирование и отладку системы. Это включает в себя проверку работы всех компонентов, а также проверку эффективности системы подавления помех. Важно провести тестирование в различных условиях, чтобы убедиться в надежности работы системы.
Сравнение модулей подавления помех
| Модель | Частотный диапазон | Мощность | Потребляемая мощность |
|---|---|---|---|
| Модель А | 2.4 ГГц - 5.8 ГГц | 10 Вт | 5 Вт |
| Модель Б | 2.4 ГГц - 6 ГГц | 20 Вт | 10 Вт |
Примечание: Данные приведены в качестве примера. Для получения актуальной информации обратитесь к производителям.
Заключение
Проектирование пользовательских портативных беспилотников с модулями подавления полной частоты — сложная задача, требующая глубоких знаний в области электроники и программирования. Однако, следуя рекомендациям, изложенным в данной статье, вы сможете создать надежное и эффективное решение для ваших конкретных задач. Помните о соблюдении всех норм и правил безопасности, а также о законодательных ограничениях.
Соответствующая продукция
Соответствующая продукция.jpg)




.jpg)
Самые продаваемые продукты
Самые продаваемые продукты



水印图-1.jpg)

.jpg)

Связанный поиск
Связанный поиск- Поставщики ODM крышки подавителя дрона
- OEMlora модуль передачи данных производители
- Поставщики заказных модулей связи lora
- Индивидуальные анти-беспилотник пулемет анти-беспилотник модуль инженерные
- lora модуль купить
- Индивидуальные модуль e32 lora модуль инженерии
- ODM автомобилей беспилотных помех заводов
- ручной детектор дронов
- подавитель дронов цена
- OEMantidrone rex 2 производитель



